Photogrammetry measures object shape in the first instance, and with the provision of external scale information precisely measures size. Thus, the relative accuracy achieved in a given measurement network is independent of object size and is therefore generally referred to in the form of 1: x,000 of the size of the object. V-STARS is capable of relative accuracy to about 1:200,000, which means 0.025mm for an object of 5m principal diameter, or 0.1mm on a 10m object.
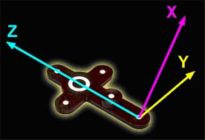
The V-STARS AutoBar is a fixture with five targets arranged in the form of a cross. The target's known coordinates are used by GSI's AutoStart procedure to determine the camera's orientation relative to the AutoBar. The AutoBar is securely attached on or near the object to be measured, preferably in a highly visible location. The default XYZ coordinate system is as shown on the figure below.
V-STARS uses this procedure to obtain the preliminary orientation (location and aiming) of each photograph taken in a measurement. In order to AutoStart four target points with known X, Y, Z coordinates need to be measured in an image. The only requirement is that the four points should not lie in a line. AutoStart is often used in conjunction with the AutoBar to enable fast, easy and automatic measurement.
Abbreviation for Coordinate Measuring Machine. A widely used family of machines that make 3D measurements of objects. Typically, the 3-axis machines have a moving head with a measuring tip attached (usually the head is attached to rails and a gantry. The head is encoded so that everywhere it touches the object, the 3D position is measured. Photogrammetry can be thought of as an optical CMM
V-STARS coded targets consist of a central circle surrounded by a pattern of dots or squares. The pattern of the ‘code nuggets’ around each center point uniquely identifies that target. Coded targets facilitate fully automatic 3D measurement.
When approximate XYZ coordinates are available for all or some of the target points on an object appearing in an image whose position and orientation is approximately known, the orientation information can be used to predict image point x,y locations of the targets to enable automatic measurement (eg via the AutoStart or SuperStart procedures).
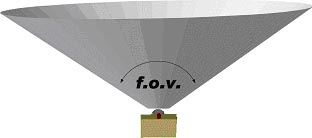
The camera's field of view defines how much it sees and is a function of the focal length of the lens and the size (often called the format) of the digital sensor. For a given lens, a larger format sensor has a larger field of view. Similarly, for a given size sensor, a shorter focal length lens has a wider field of view.
The range of acceptable sharpness is called the depth of focus. The depth of focus of a lens is a function of many factors, including the focal length, format size, distance from the camera to the object, object size and the f-number of the lens. Cameras employed with V-STARS have been designed with fixed focus lenses so that images will be in acceptable focus for distances between 0.5 meters (20 inches) and 60 meters (200 feet) from the camera.
The F-number is the ratio of the lens focal length to the diameter of the lens iris. The f-number provides an indication of the light sensitivity of the lens. The lower the f-number, the more light sensitive is the lens. However, lower f-numbers also reduce the depth of focus.
The camera's flash must fire at the same time that the camera's shutter is completely open or else the retro-reflective targets will not be exposed.
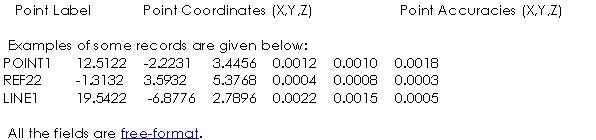
Free-format fields do not have to occupy any particular columns of the record. Each field need simply end with a blank or comma or tab character. A free-format field may also have any number of leading blanks.
Orientation is the term used for the cameras position and aiming in space. The orientation of a camera is defined by its XYZ coordinates and by its aiming direction (defined by three rotation angles). GSI's AutoStart and Resection procedures are used to accurately determine the camera orientation.
Photogrammetry is an image-based 3D coordinate measuring technique that uses images from digital cameras as the fundamental medium for metrology (or measurement). In order to establish the 3D coordinates of points on an object via photogrammetry, the points must be imaged on two or more photographs; their position is then determined from the oriented images via optical triangulation or spatial intersection.
Resection is the procedure used to obtain the position and aiming (called the orientation) of the camera when an image is recorded. Typically all the points of known XUZ coordinates that are seen a in the image are used to determine this orientation.
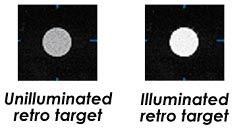
A property which causes light to be reflected very efficiently back to the light source. The retro-reflective targets used by V-STARS act like highway reflectors but are much more efficient. By using a low-powered flash located at the camera to illuminate the targets, the resulting target images are very bright and easy to find and measure.
The Root-Mean-Square value is a statistical measure of the dispersion or spread of a group of data. The name comes from the fact that the RMS is equal to the square root of the mean (average) sum of squares of particular values in a data set. With regard to resection, the RMS value of image coordinate residuals provides a measure of the quality of the resection.
A fixture that has two or more targets of precisely known separation. The distance(s) between the target(s) are used to scale the photogrammetric measurement, which without scale can only establish parameters of shape.
The V-STARS SuperStart command will open an image and complete the following processes:
Each record of a V-STARS XYZ file has a valid Point Label followed by the point's X, Y and Z coordinates. Sometimes, accuracy estimates for the XYZ coordinates may also be included. The format for an XYZ file is shown below.